Завдання 4: застосування навантажень, визначення контактів і уточнення сітки
У цій діяльності ви запобігаєте перебільшенню напруги з боку, яке може виникнути внаслідок миттєвого стрибка зі стану спокою до 3000 мм/с. Потім ви вносите корективи в налаштування дослідження: деякі для скорочення часу аналізу, інші для підвищення точності результатів. Щоб завершити налаштування дослідження, ви
- Застосуйте початкову лінійну швидкість до рухомої частини, щоб указати, що частина вже рухається на початку події
- Визначте глобальні параметри контактів, щоб вимкнути самоконтакт
- Уточніть сітку в місці з’єднання двох тіл.
передумови
- Дія 3 завершена.
Кроки
-
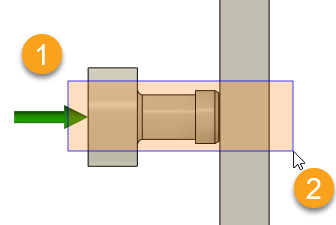
Застосуйте початкову лінійну швидкість -3000 мм/с до рухомої частини в напрямку Z.
Ця дія запобігає удару миттєвого прискорення рухомої частини на початку події. По суті, ми говоримо, що частина вже в русі на початку події.
-
Натисніть
 (Робоча область «Симуляція» > вкладка «Налаштування» > панель «Навантаження» > «Початкова лінійна швидкість»), щоб відкрити діалогове вікно «Початкова лінійна швидкість» .
(Робоча область «Симуляція» > вкладка «Налаштування» > панель «Навантаження» > «Початкова лінійна швидкість»), щоб відкрити діалогове вікно «Початкова лінійна швидкість» . -
Клацніть рухому частину, щоб вибрати її як тіло .
-
Переконайтеся, що тип напрямку встановлено на
 Вектори (x, y, z) .
Вектори (x, y, z) . -
Введіть -3000 мм/с у полі Z Velocity Component .
Примітка. Переконайтеся, що одиниці встановлено належним чином, і змініть їх, якщо це не так. -
Натисніть OK , щоб прийняти налаштування та закрити діалогове вікно.
-
-
Автоматично виявляти пари контакту тіло до тіла та придушувати самоконтакт .
У дослідженнях моделювання подій контактні пари визначаються між тілами, а не між окремими точками, краями чи гранями, і виявляються автоматично. Підтримується самоконтакт, коли частина може деформуватися та контактувати з іншою частиною себе. У цій вправі, оскільки ми не очікуємо самоконтакту, ми можемо вимкнути його, щоб скоротити час вирішення.
-
Натисніть
 (Робоча область моделювання > вкладка «Налаштування» > панель «Контакти» > «Глобальні контакти») , щоб відкрити діалогове вікно «Глобальні контакти» .
(Робоча область моделювання > вкладка «Налаштування» > панель «Контакти» > «Глобальні контакти») , щоб відкрити діалогове вікно «Глобальні контакти» . -
Переконайтеся, що глобальний роздільний контакт увімкнено, а безпосередній контакт вимкнено.
Примітка: контактна взаємодія розділення відбувається всюди, де дві частини торкаються під час симуляції. Частини можуть ковзати одна вздовж одної та вільно відділятися одна від одної, але не допускається проникнення одна в одну. -
Розгорніть Додаткові параметри .
-
Вимкніть Дозволити самостійний контакт .
-
Натисніть «Створити» , щоб створити контактні пари та закрити діалогове вікно.
-
-
Змініть довжину сітки на 1 мм на обох частинах, де фіксуючі пальці рухомої частини контактують із нерухомою частиною, коли обидві з’єднуються, таким чином:
(i) На замикаючих пальцях нерухомої частини (усі грані, включно з філіями, де вони стикаються з основною частиною тіла. Вам потрібна більш тонка сітка, щоб точніше вловлювати напруги згину. Філії в основі пальців є концентрація напруги та області критичної напруги Ви також хочете створити гладку сітку в області контакту, яка точніше відповідає циліндричній формі моделі CAD.
(ii) У середньому отворі та його фасці на нерухомій частині, щоб створити гладку сітку в області контакту цієї частини.
-
Використовуючи ViewCube, змініть точку огляду моделі, щоб показати нижню частину моделі, як показано на зображенні нижче.
-
Натисніть
 (Робоча область моделювання > вкладка «Налаштування» > панель «Вибір» > «Фільтри вибору») і переконайтеся, що «Наскрізний вибір» активовано.
(Робоча область моделювання > вкладка «Налаштування» > панель «Вибір» > «Фільтри вибору») і переконайтеся, що «Наскрізний вибір» активовано.Це необхідно для того, щоб приховані грані були включені, коли ми вибираємо області для уточнення сітки.
-
Натисніть
 (Робоча область симуляції > вкладка «Налаштування» > панель «Керування» > «Керування локальною сіткою») .
(Робоча область симуляції > вкладка «Налаштування» > панель «Керування» > «Керування локальною сіткою») . -
Клацніть і перетягніть мишу зліва направо, щоб охопити область, вказану на наступному зображенні:
У діалоговому вікні «Редагувати локальне керування сіткою» має бути зазначено, що вибрано 18 граней/країв .
Примітка. Коли ви клацаєте та перетягуєте мишу зліва направо, вибираються лише ті сутності, які повністю входять у прямокутник. Якщо ви клацнете та перетягнете мишу справа наліво, буде виділено все, що перетинає прямокутник, а це не те, чого ми хочемо. -
Введіть 1 мм у полі «Довжина» , щоб установити локальний розмір сітки.
-
Натисніть OK , щоб прийняти налаштування та закрити діалогове вікно.
Порада: у веб-переглядачі розгорніть вузол Local Mesh Controls , наведіть курсор на Local Mesh:1 і натисніть Відредагуйте , щоб побачити уточнення сітки вздовж поверхні всієї частини. Ви бачите, що довжина краю тепер менша в місці з’єднання двох частин.
Відредагуйте , щоб побачити уточнення сітки вздовж поверхні всієї частини. Ви бачите, що довжина краю тепер менша в місці з’єднання двох частин. 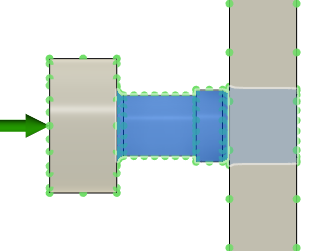
-
Підсумок заняття 4
У цій діяльності ви
- Застосовано початкову лінійну швидкість до рухомої частини, щоб указати, що частина вже рухається на початку події
- Визначено глобальні налаштування контактів, щоб вимкнути самоконтакт, щоб зменшити час вирішення
- Зменшено довжину сітки в місці контакту двох тіл, щоб підвищити точність розв’язання.
Орігінал сторінки: Activity 4 Apply loads define contacts and refine the mesh